The Imitation learning centre is a network of researchers at CIIRC (Czech Institute of Informatics, robotics, and cybernetics) CTU in Prague. Our goal is to research and promote methods for teaching new skills to robots and enabling them to work side by side with humans or other robots. We create multi-modal human-robot interfaces by integrating skill demonstrations, gestures, natural language instructions, and visualizations. We facilitate planning and scheduling, reinforcement learning, and advanced robot control to support the teaching process, improve the robot's performance, dexterity, and safety.
iChores
The project description will soon be filled!

- Michal Vavrecka
Mirracle
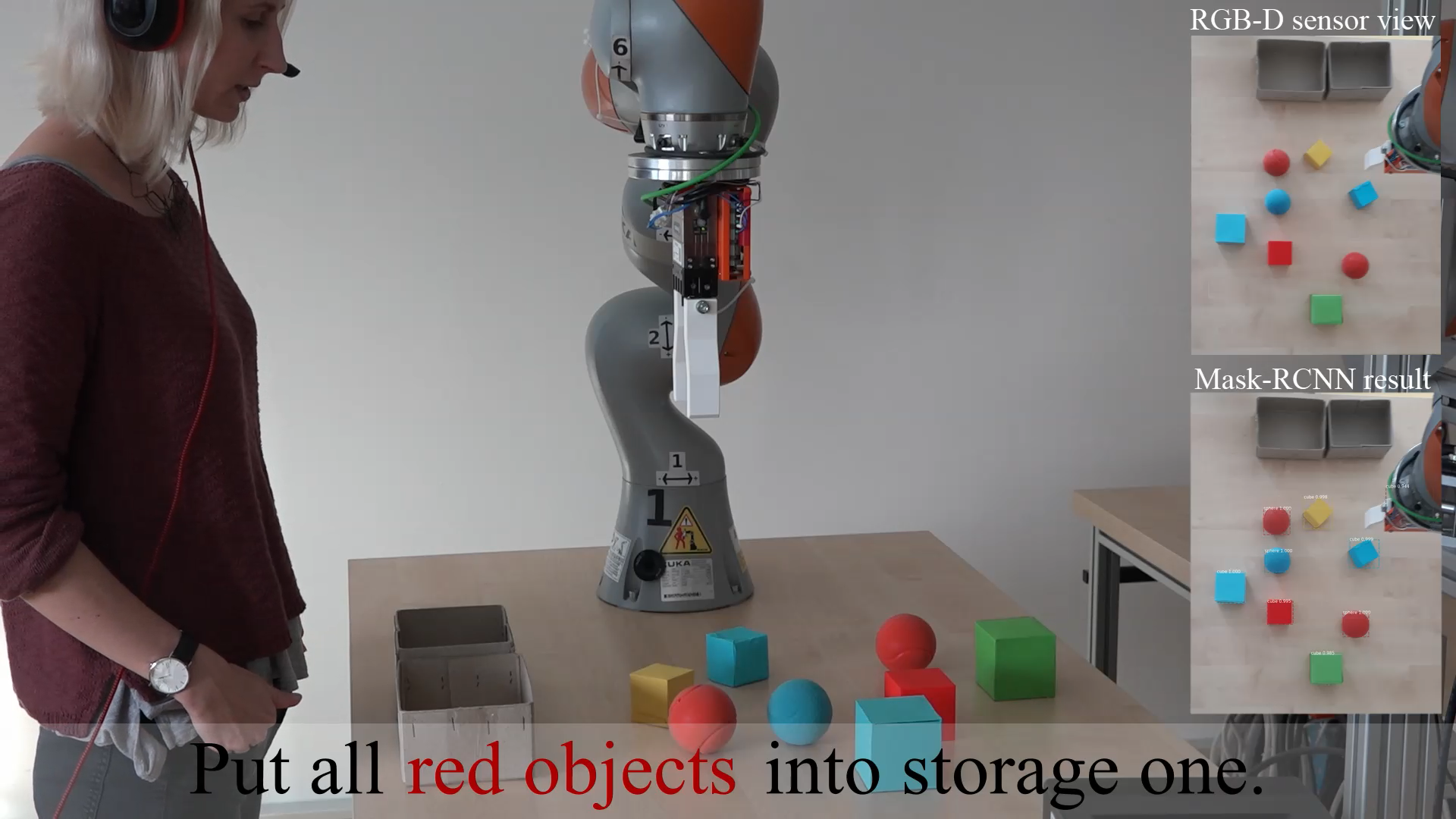
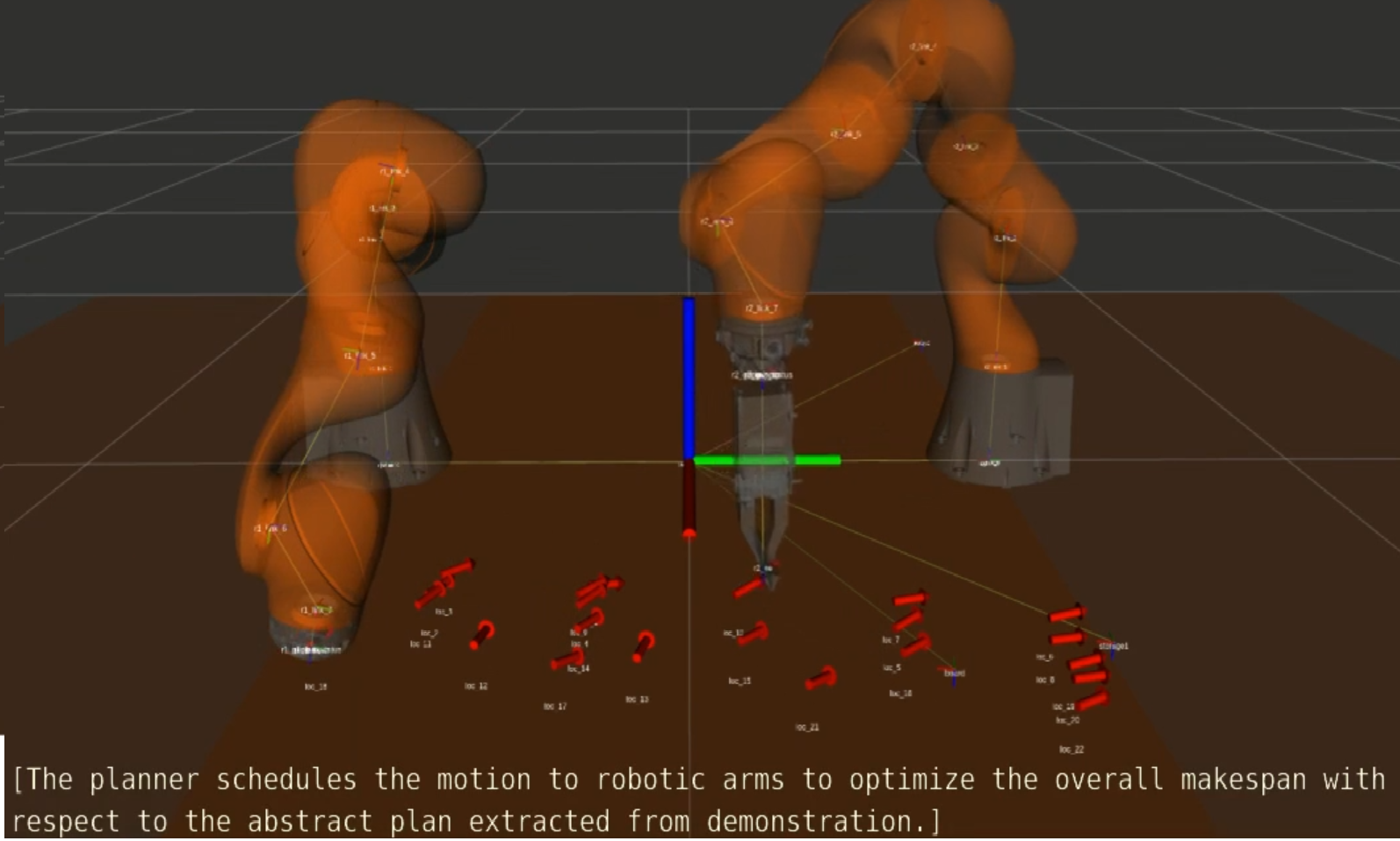
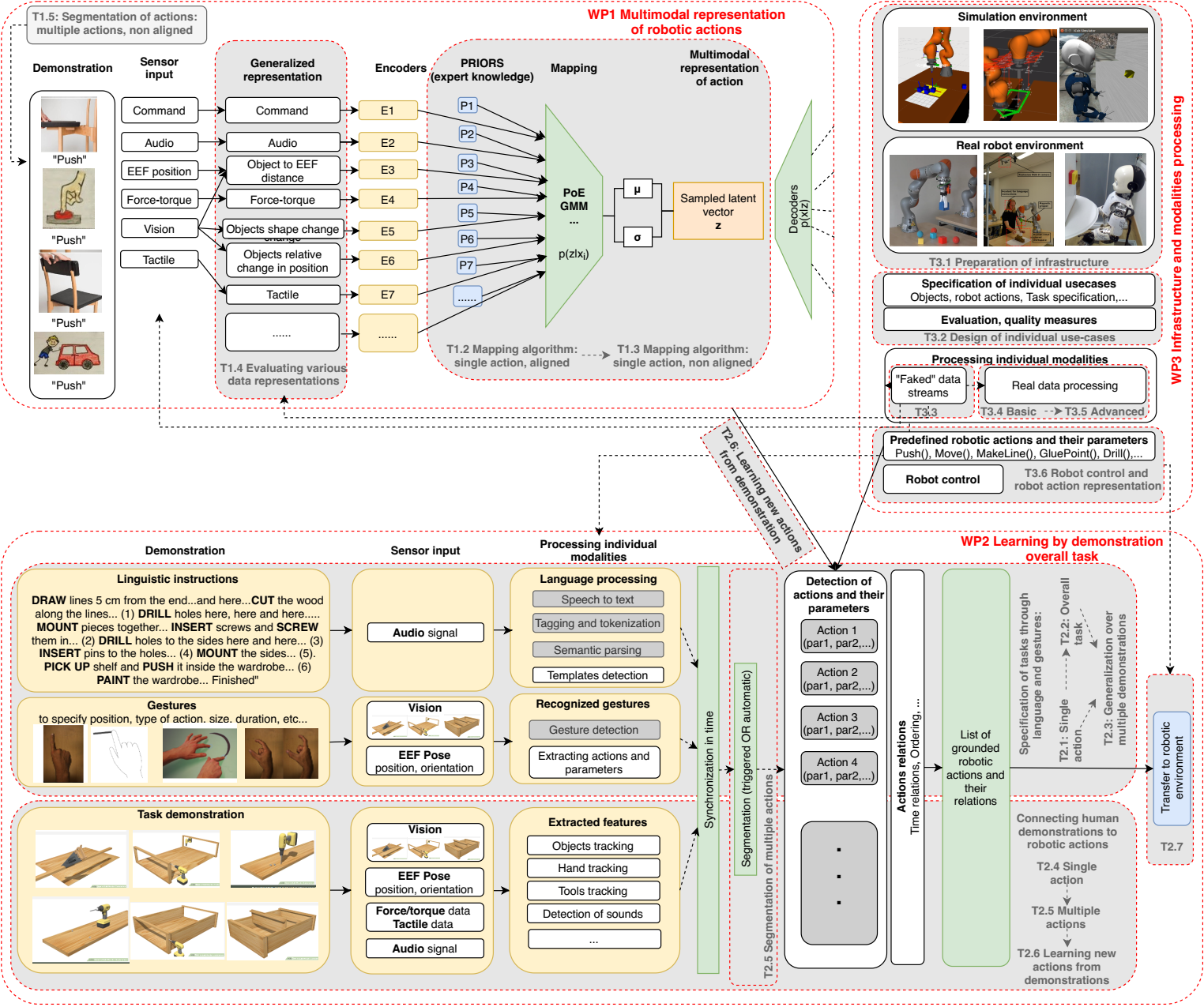
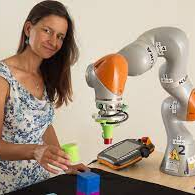
In most robotic applications, robot actions (such as pick, place, push, touch, mount, etc.) are
programs created by expert roboticists. In the face of the uncertainties and flexibility need of the
real world, these approaches often lack the required robustness. When we consider how
humans solve dexterous manipulation tasks, we observe that many modalities (vision,
proprioception, touch, etc.) are combined to form a robust reactive procedure for manipulating
and navigating our surroundings. In this project, we will design a mapping algorithm that will
enable us to create such a multimodal representation of actions that incorporates prior
knowledge about the uncertainty of different domains, and show how this can be used to ease
teaching robotic actions and generalize them to new embodiments (e.g. different robots,
grippers, etc.) and environment. Finally, we will apply the results to learning by demonstration.
- Karla Stepanova
Crow
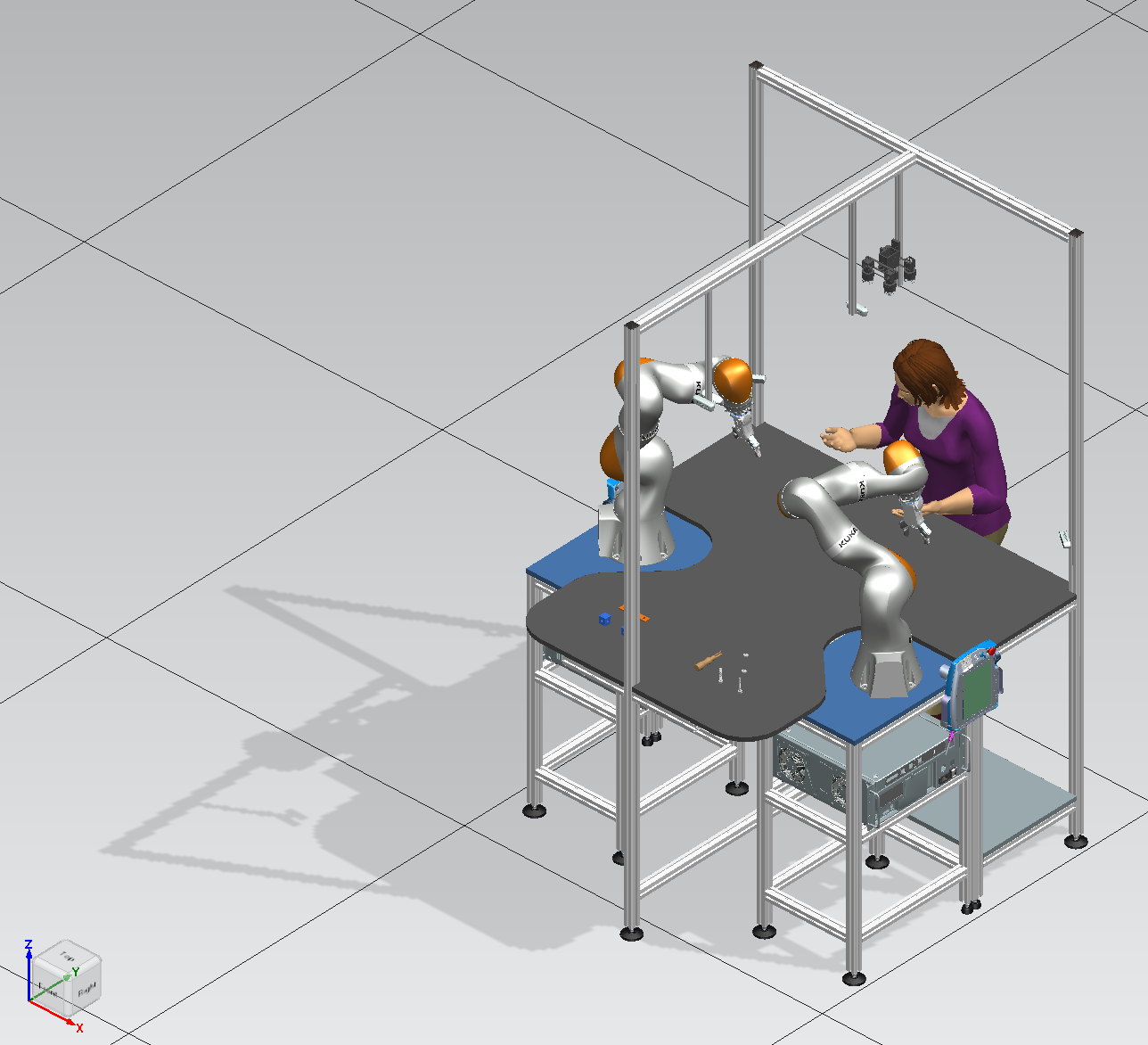
One of the key goals of collaborative robotics is sharing a workspace between robot and a human operator. The shared
workspace is used by both human and robot to complete a common task – either in parallel or as a part of active
collaboration.
In both cases, the robot should not require separation from the human operator by a protective barrier (e.g., a metal
cage). An important aspect of a collaborative robot is the understanding of the scene (i.e. where is the human and what
and where are the objects on the scene/workspace) and the ability to react to the immediate needs of the operator (e.g.,
need for a specific tool). Additionally, the robot should be able to predict the future steps in the production process.

- Radoslav Skoviera