Specifying robot tasks for low-volume manufacturing scenarios is an open problem. The state-of-the-art
robotic systems enable the application of smooth 2D paths to a 3D surface but assume that the product engineer provides these
paths. We extend this approach with a novel tool-path specification method, which produces smooth paths from noisy demonstrations.
The user demonstrates only short patterns and selects a base path relative to an object in front of the robot, along which these
patterns should be applied. The representation based on polynomials allows controlling the grade of the smoothness of the
resulting tool path. We generate parametrized robot trajectories to meet the use-case-specific constraints and adhere to the
robot's kinodynamic limits. We propose a set of measures to evaluate the quality of the generated curves and corresponding
trajectories with respect to executability by a robot. The evaluation in simulation and real-robot experiments showed that the
robot could reach up to 15.9% higher constant speed on tool paths generated by our system compared to unprocessed paths.
Video
Video showing the usage of the proposed system.
Citation
R. Skoviera, J. K. Behrens and K. Stepanova, "SurfMan: Generating Smooth End-Effector Trajectories on 3D Object Surfaces for Human-Demonstrated Pattern Sequence," in IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9183-9190, Oct. 2022, doi: 10.1109/LRA.2022.3189178.
Materials
TrialDatam Planners and Examples can be found here.
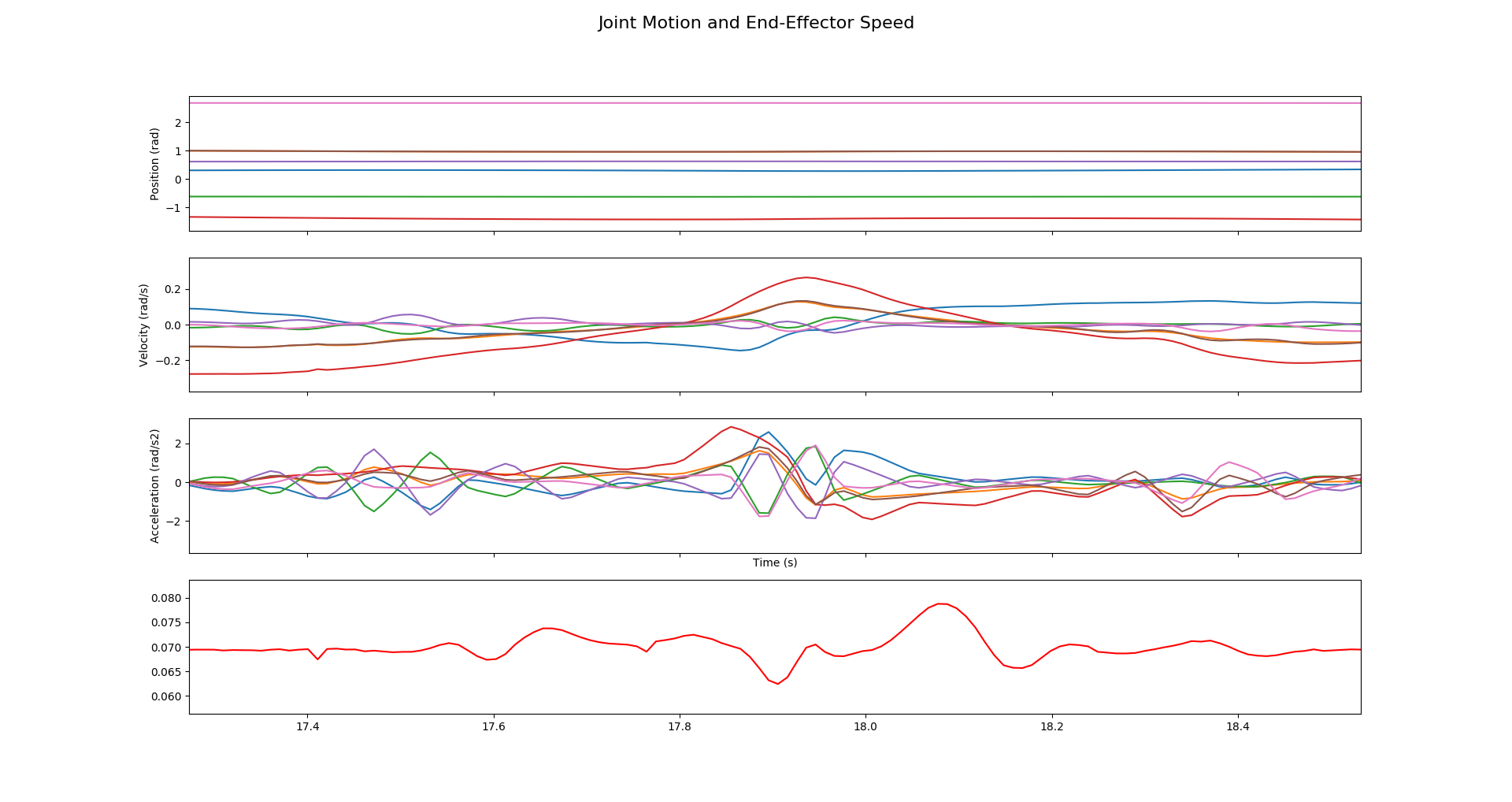
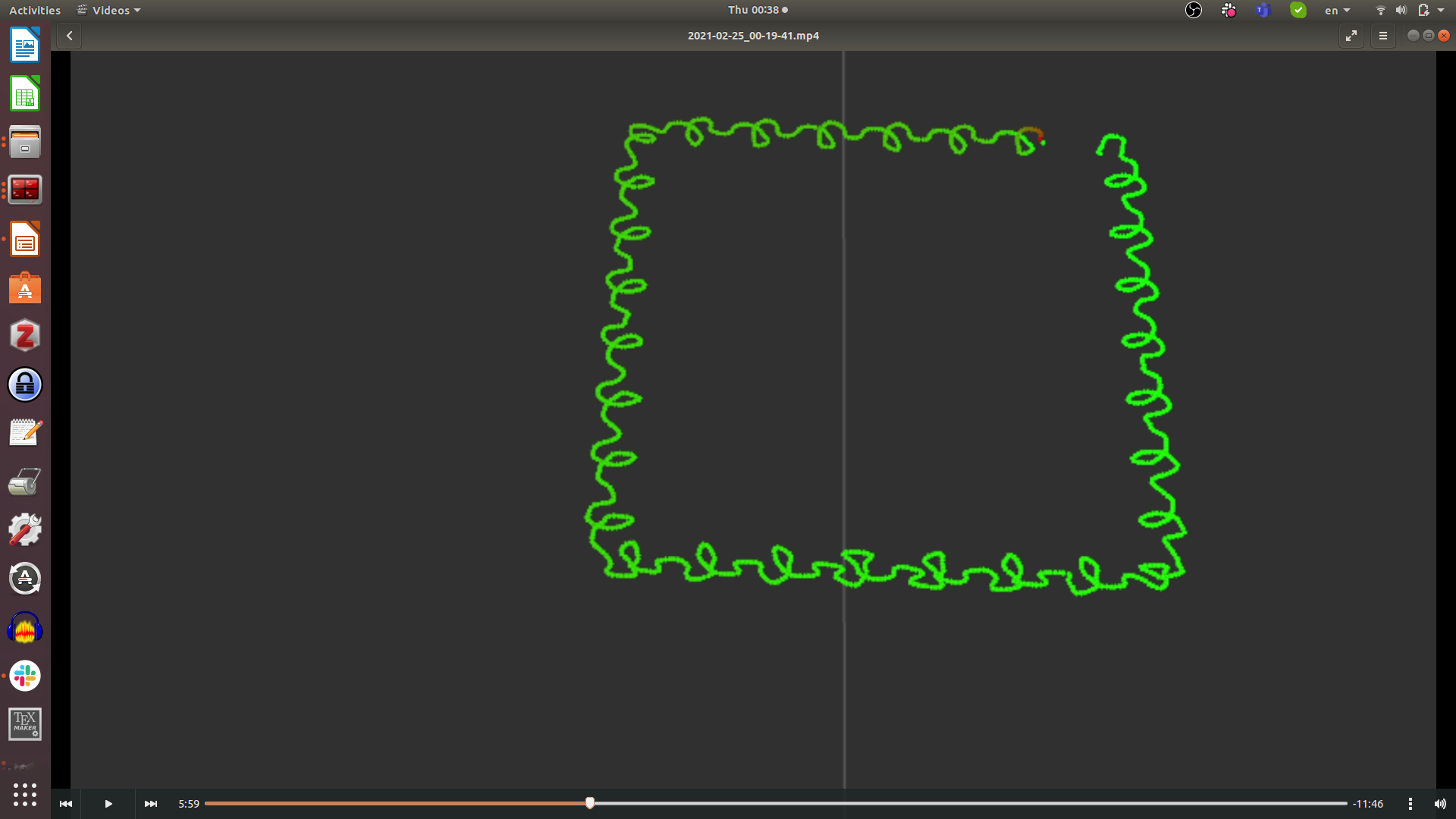
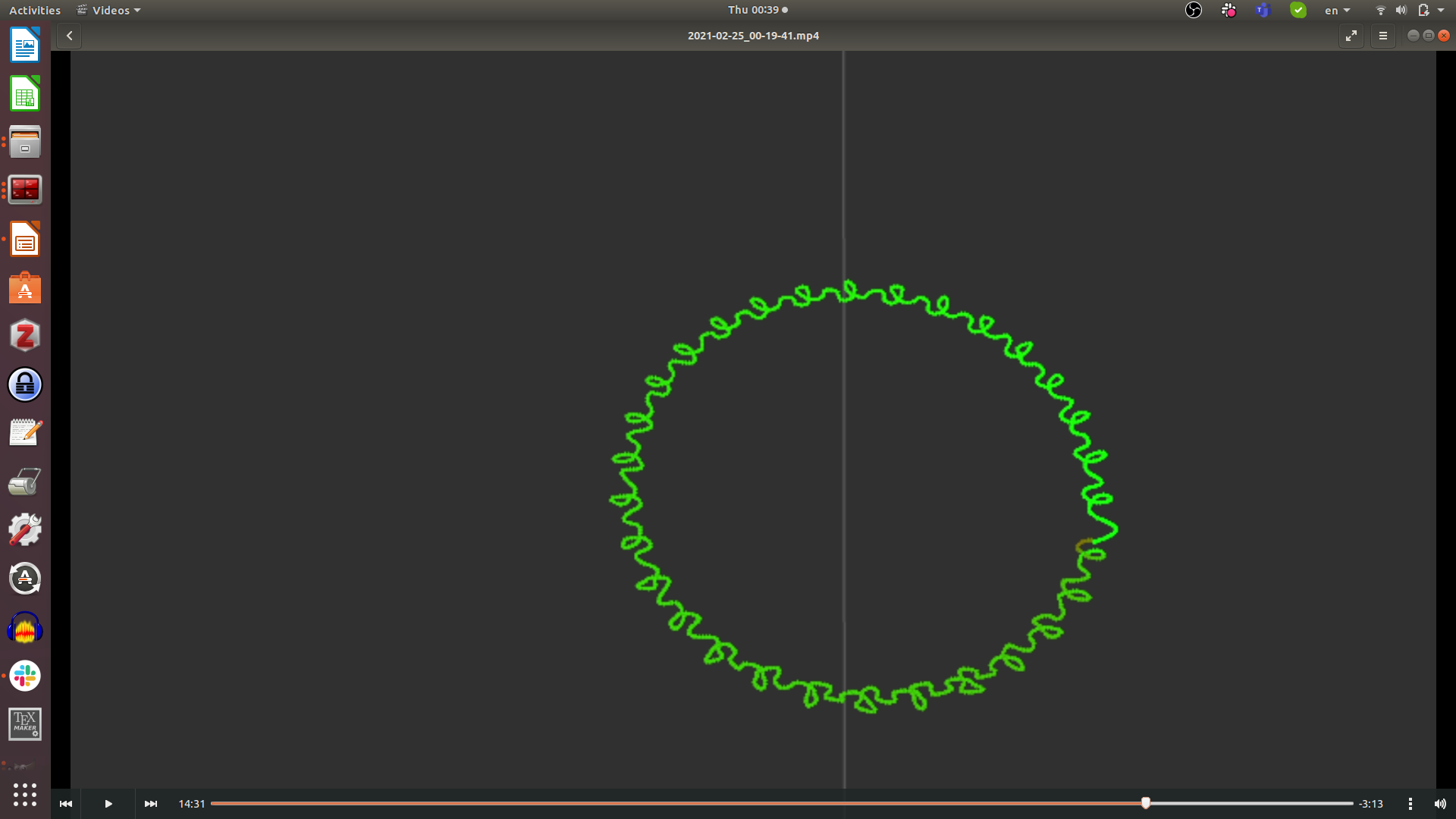
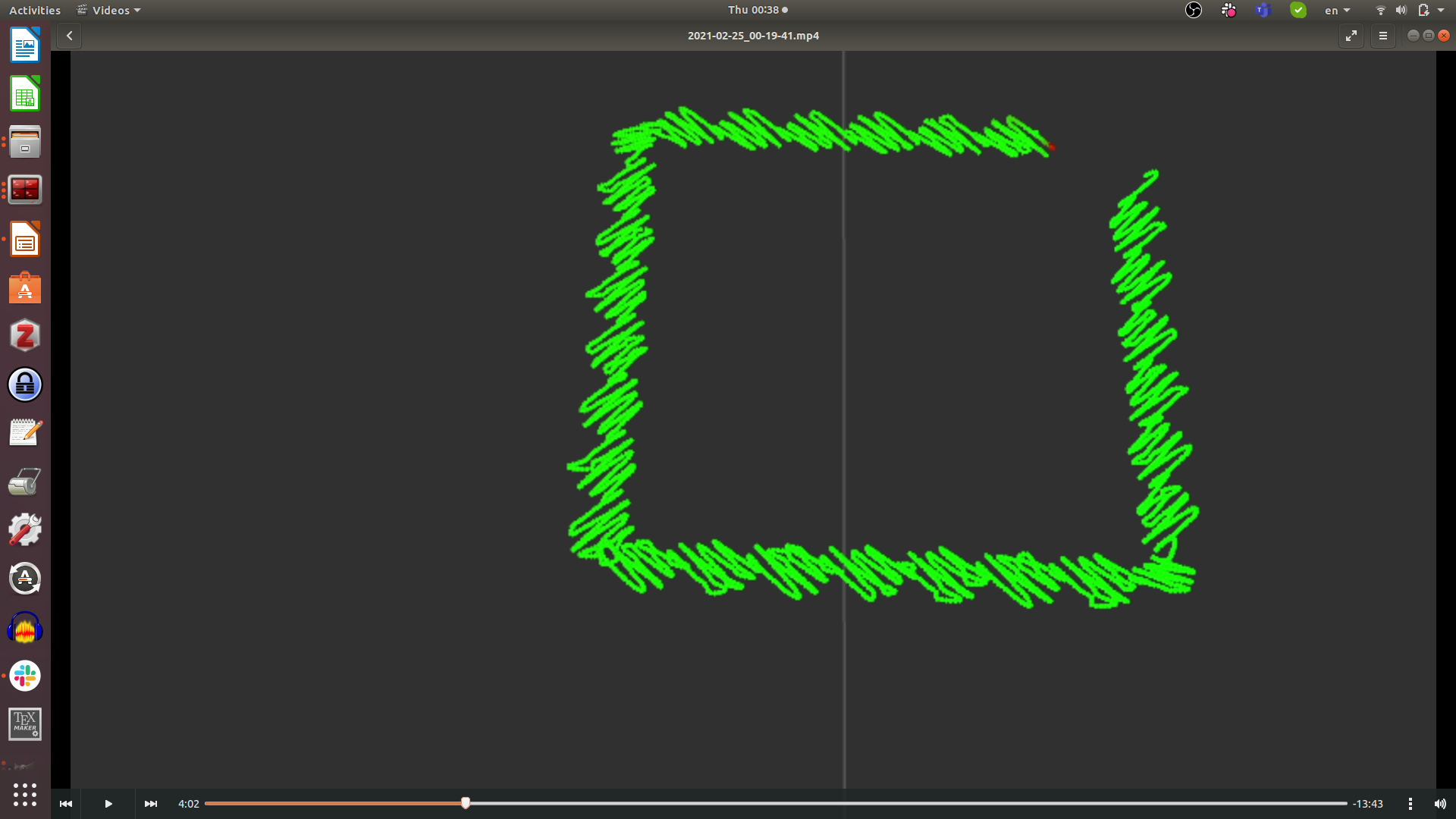
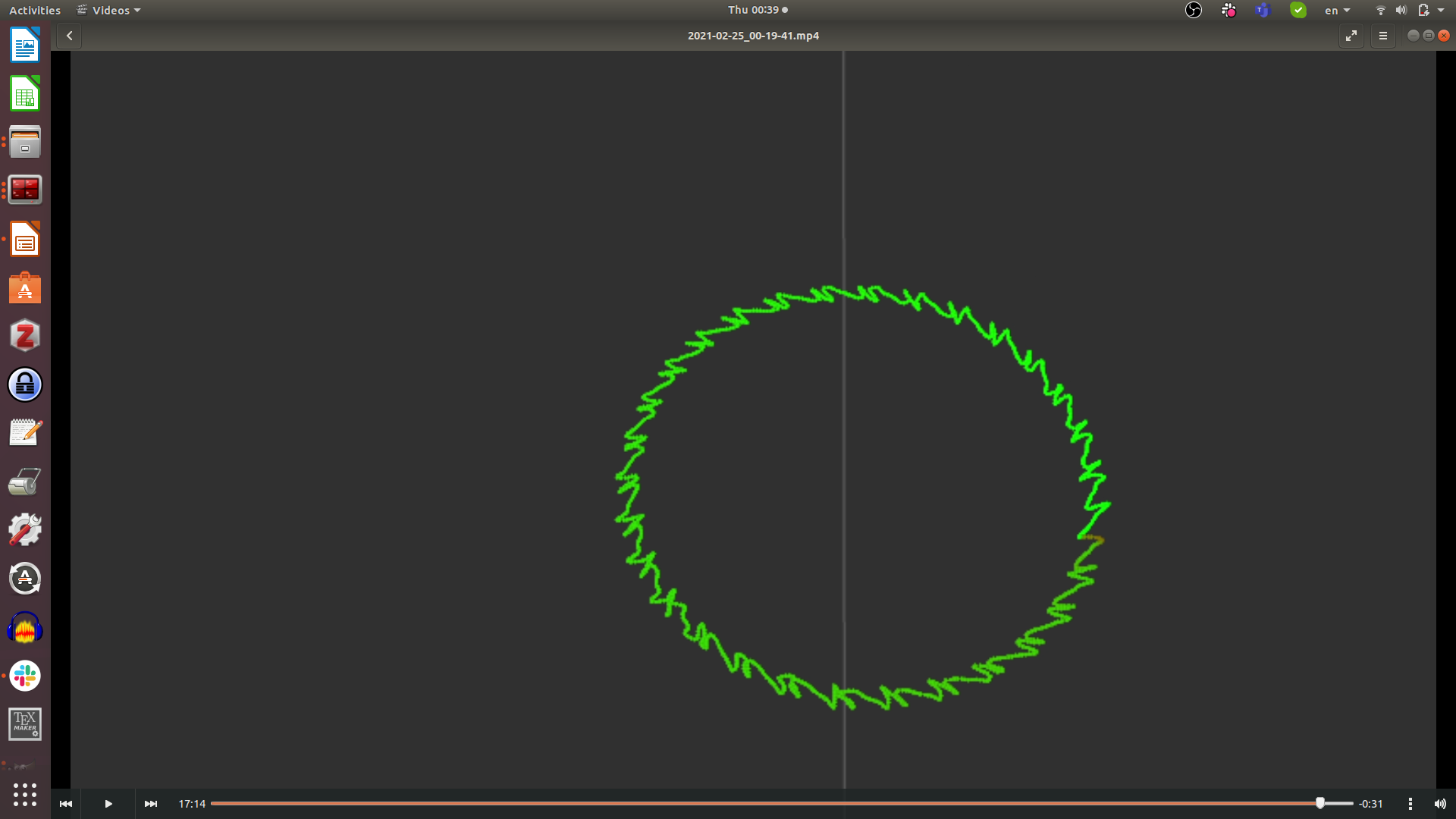
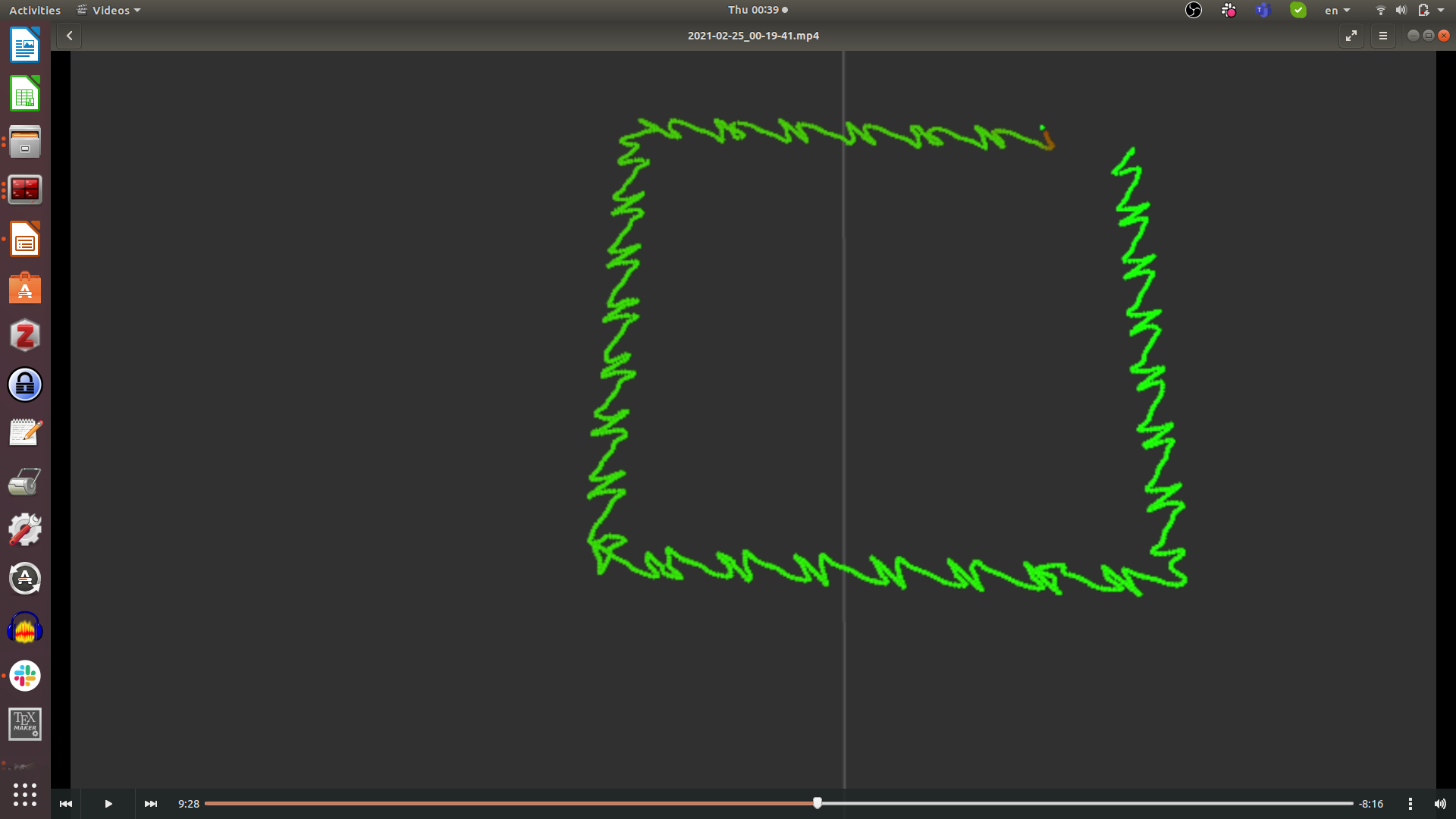
Plot of the trajectory from the Descartes planner (10 repetititons of knots applied to a circle):
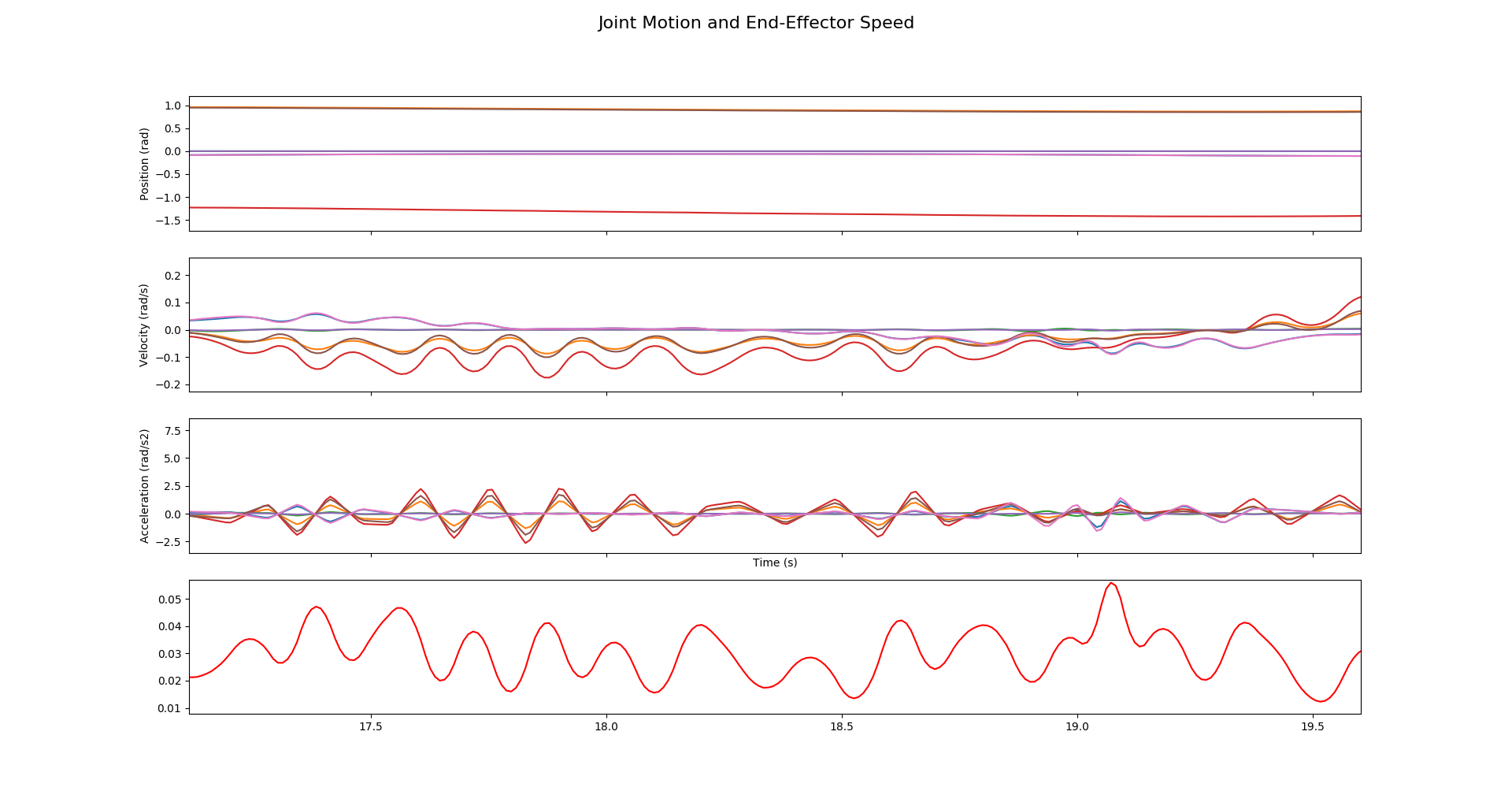
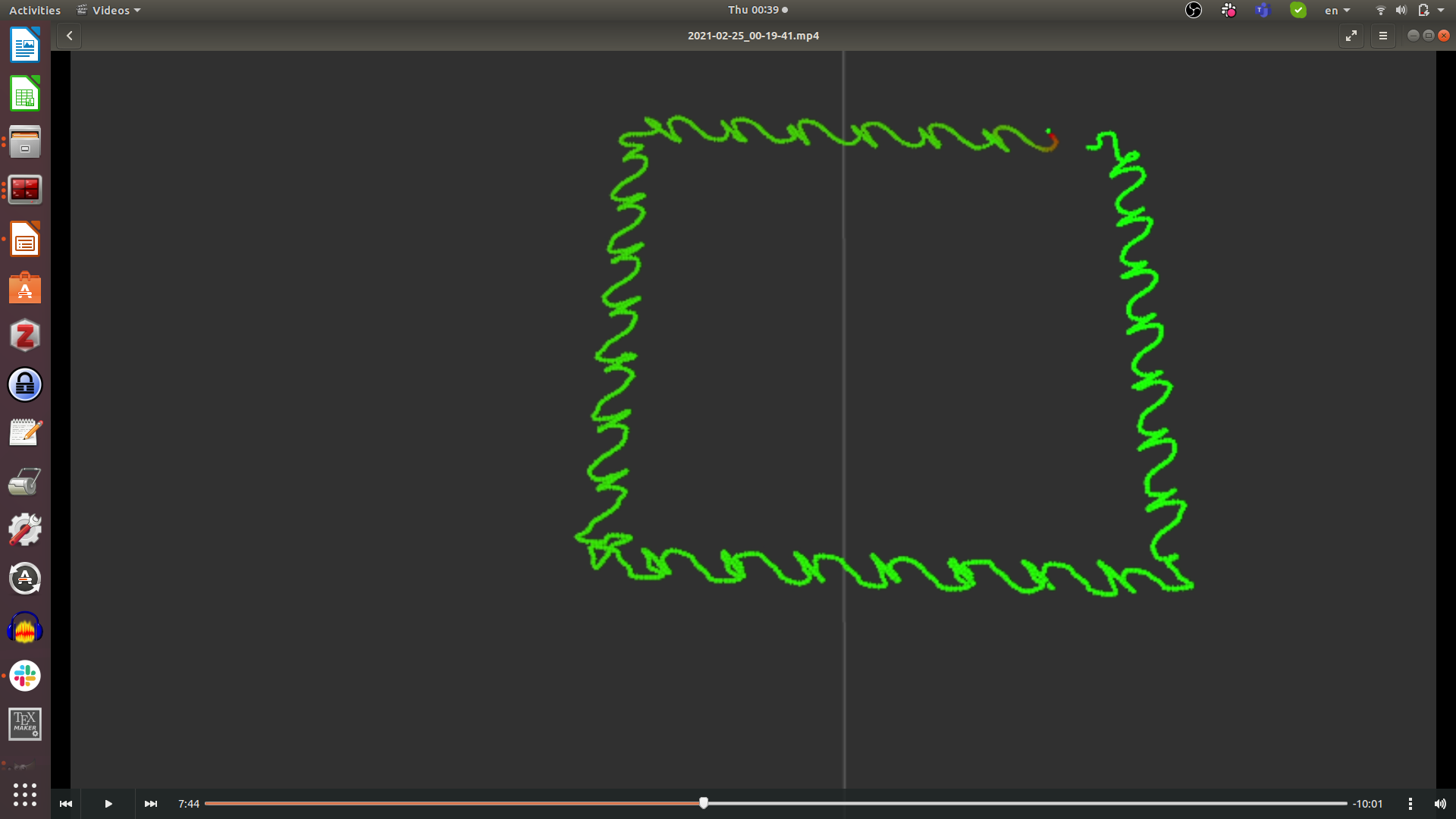
Plot of the trajectory from the Cartesian planner (10 repetititons of knots applied to a circle):
Video showing the trajectory execution by Descartes planner.
Video showing the trajectory execution by Cartesian planner.
Examples of setting parameters for contour detection.
Video showing the contour detection process (video shows well in Chrome, not in Firefox).
Video showing the contour detection process.
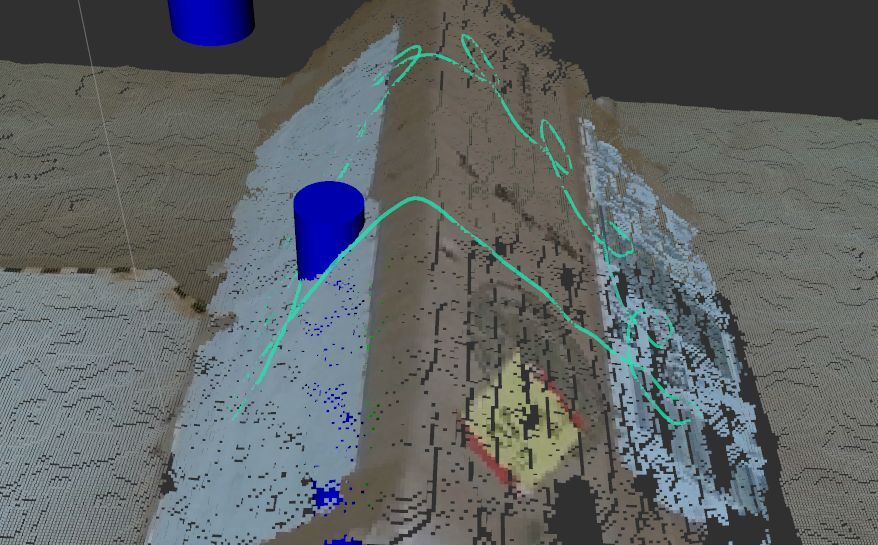
Examples of various patterns applied to 3D surfaces.
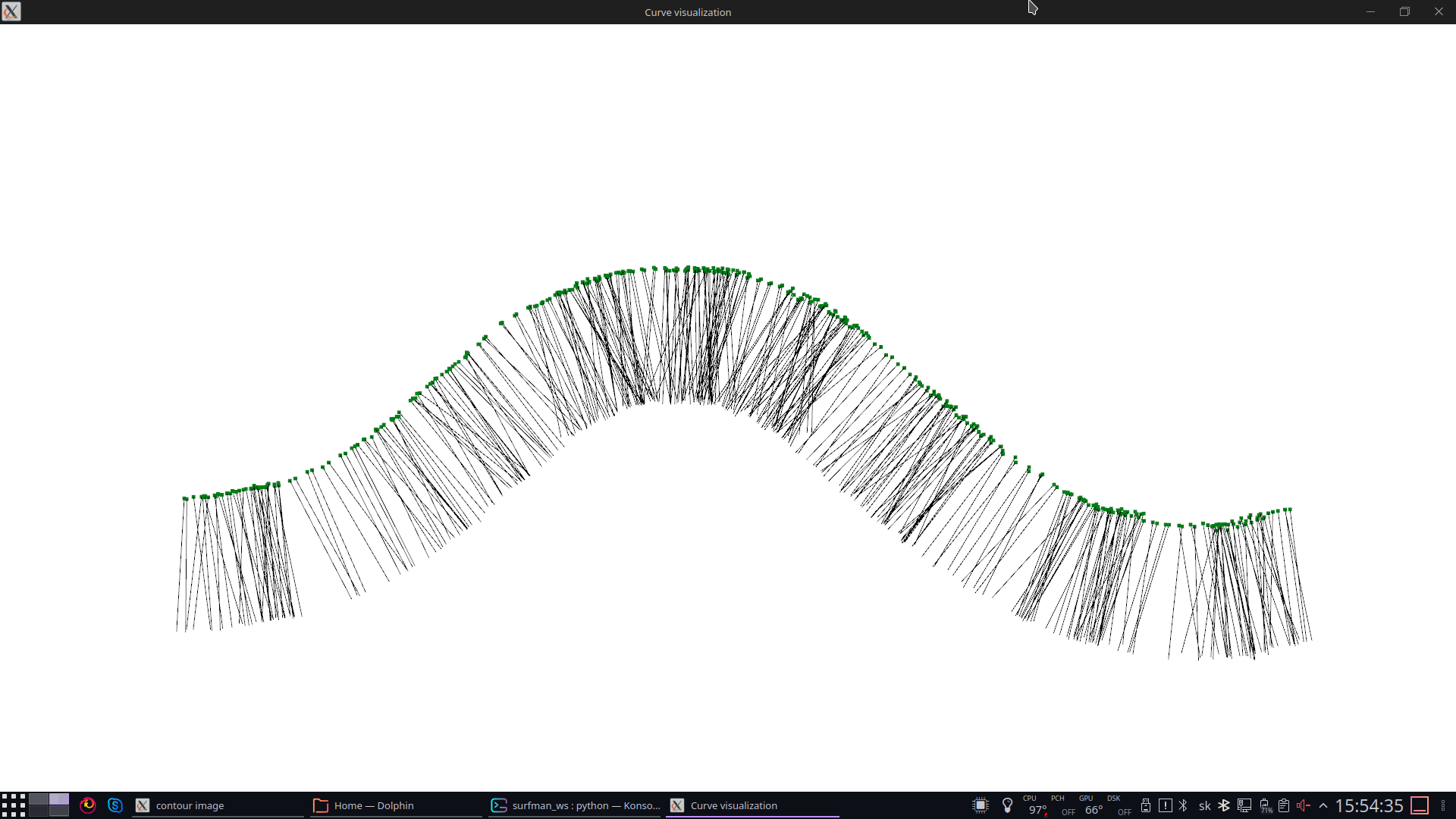
(the black lines coming from the points depict the tool orientation vector) (the black lines coming from the points depict the tool orientation vector)
Examples of various patterns applied to different curves - simulation.