Imitrob dataset version 1.0
We have created a dataset for 6DOF pose estimation featuring a glue gun and its usage for applying glue on top of wooden/cardboard shape primitives. The glueing is performed by multiple users, in different trajectories and with variable glueing styles. The image sequences are completely annotated with depth masks, 6DOF pose of the tool, coordinates of the end effector etc. The spatial information about the glue gun was collected from a HTC Vive controller attached on top of the tool.
The dataset is divided into four sub-datasets according to their main focus. Each dataset can be downloaded and used independently, yet they can be combined to provide enough variability for training and testing. The sub-datasets are following:
- Tool Recognition Dataset
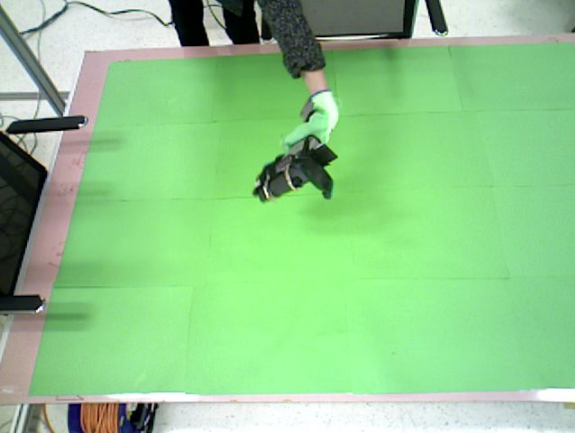
Static data for recognition of a glue gun tool from RGB(D). Includes glue gun alone against green background, as well as held in hand and rotated in different angles.
- Tool Motion Tracking Dataset
Data to learn motion tracking of the glue gun, which is used by different users, each performing several different trajectories and glueing styles, on one shape only.
- Tool Motion Tracking Dataset 2 (Extension)
Data to learn motion tracking of the glue gun, used by one user who uses the tool on multiple shapes, multiple different trajectories and with multiple glueing styles. The variability is systematically covered across all categories.
- Special Showcases with Natural Language Commands
Additional material where a glue gun is used for assembly task demonstration along with natural language commands.
The first motion tracking dataset is captured from two different viewpoints at the same time, while the rest is captured only from one viewpoint (but the tool is rotated so that it is visible from most angles). All data is fully annotated with RGB(D) images, 6DOF poses, end effector coordinates, bounding boxes etc.
Each dataset can be downloaded either in the form of raw ros bags (with attached code for data extraction), or as already extracted data with corresponding annotations. The detailed description for each sub-dataset is below.
Download the dataset from Google Drive:
Download
IMITROB dataset documentation (same as below):
PDF
Tool Motion Tracking Dataset

Description
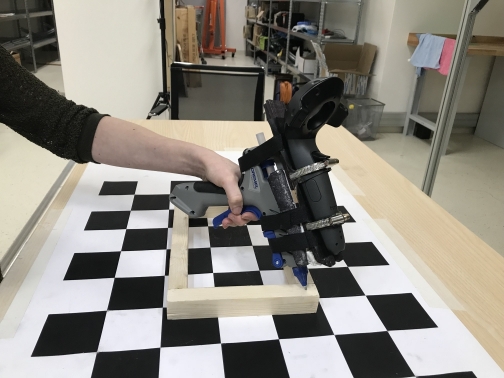
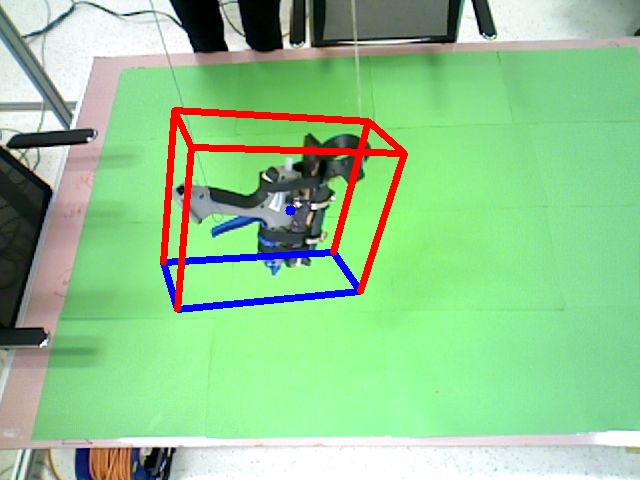
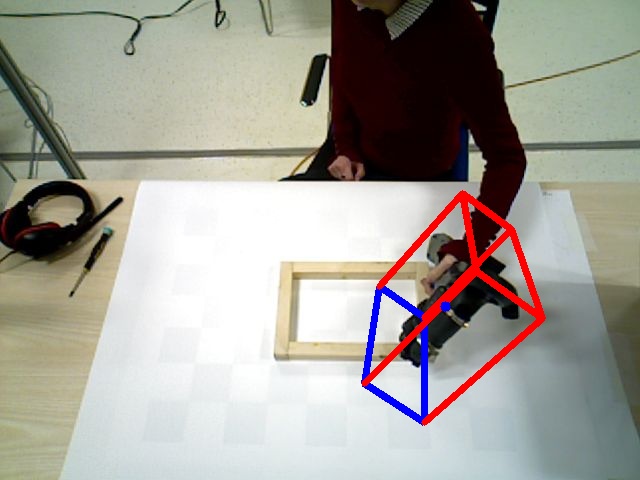
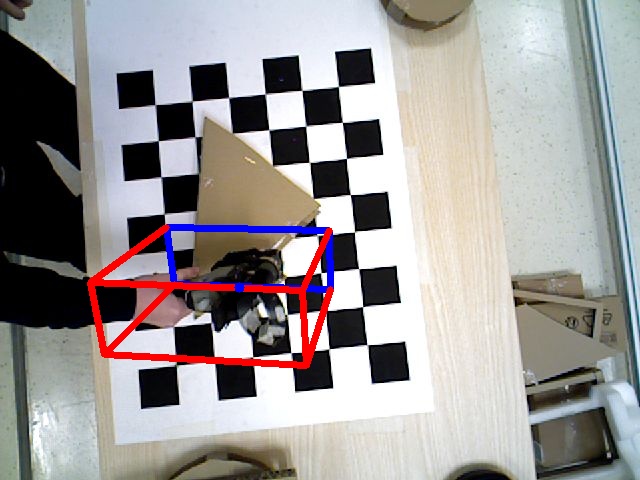
In the motion tracking dataset, the human demonstrator uses the glue gun in 5 different trajectories to imitate glue application on a wooden frame. Each trajectory is recorded with 10 repetitions for each user, the current number of users is 2. The scene is recorded by two Asus XTION cameras, one positioned above the scene and one on the side (see attached image).
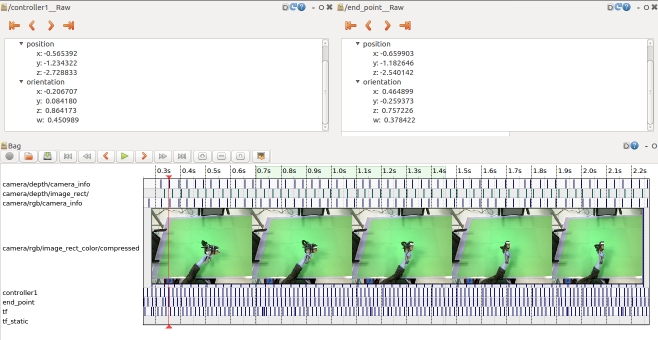
Raw version
The raw dataset, consisting of ros bags only, will take 70 GB of your disk space. Each bag file contains a single trial of a given trajectory type. The topics include RGB and depth images (recorded by Asus Xtion) from two different viewpoints, as well as cartesian pose of the glue gun end effector (topic /end_point), position of HTC Vive on the top of the gun (topic /controller1) and position in the world frame (topic /tf). An extracted and processed version is also available for download.
The complete list of ROS topics available:
/XTION2/depth/camera_info
/XTION2/depth/image
/XTION2/depth/image_rect
/XTION2/rgb/camera_info
/XTION2/rgb/image_rect_color/compressed
/XTION3/XTION3/depth/camera_info
/XTION3/XTION3/rgb/camera_info
/XTION3/XTION3/rgb/image_rect_color/compressed
/XTION3/camera/depth/image_rect
/controller1
/end_point
/tf
Processed version
Similarly as in the tool recognition dataset, the processed version contains extracted RGB images, glue gun 6DOF coordinates and depth images. The dataset structure is following. On the top level, the directory is sorted according to the 5 trajectories (shortcuts are explained in attached README). Each trajectory folder contains subfolders labeled by different subjects. For each subject, the 10 individual trial folders are separated into two subfolders according to the camera by which they were recorded.
Tool motion tracking dataset - extended

Description
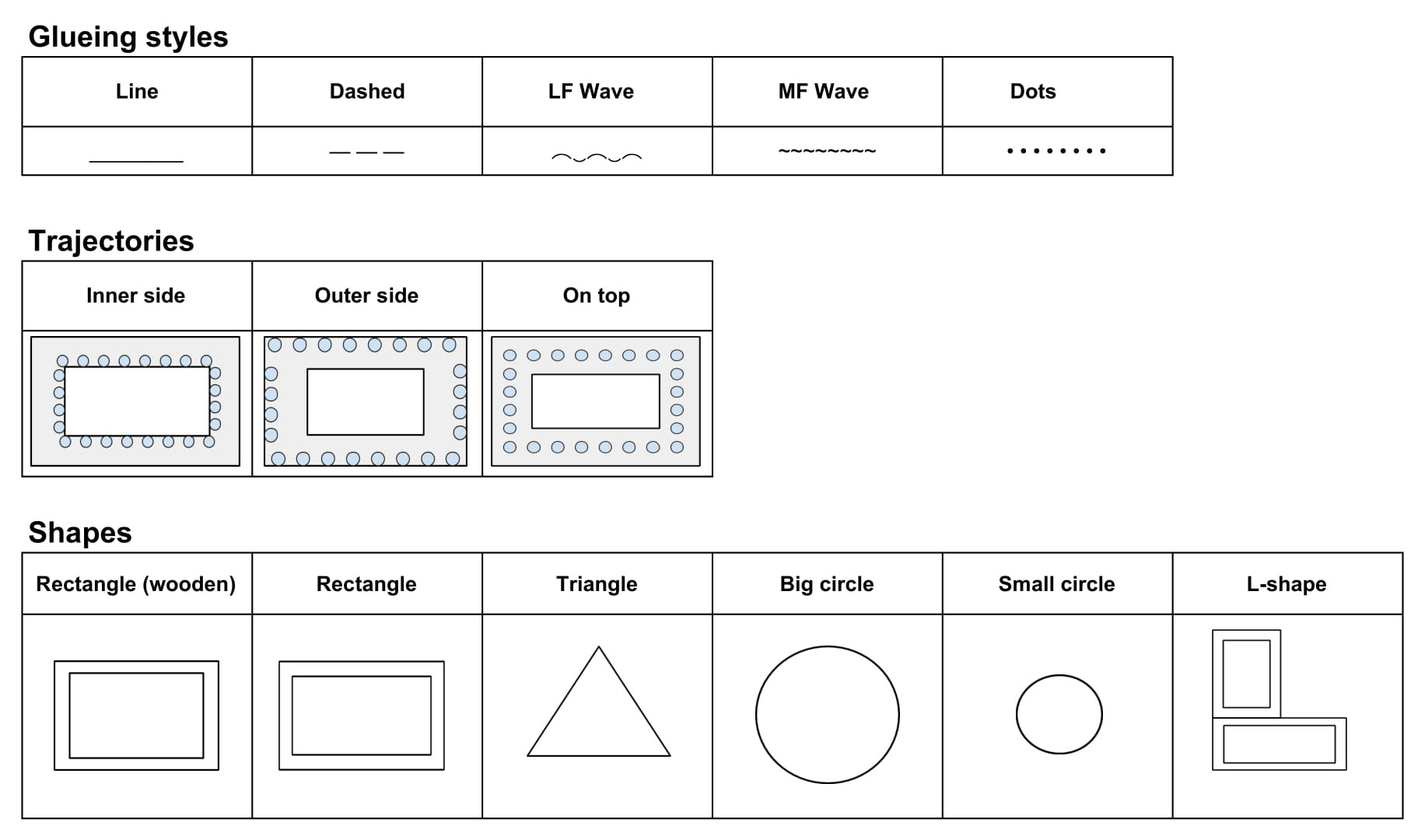
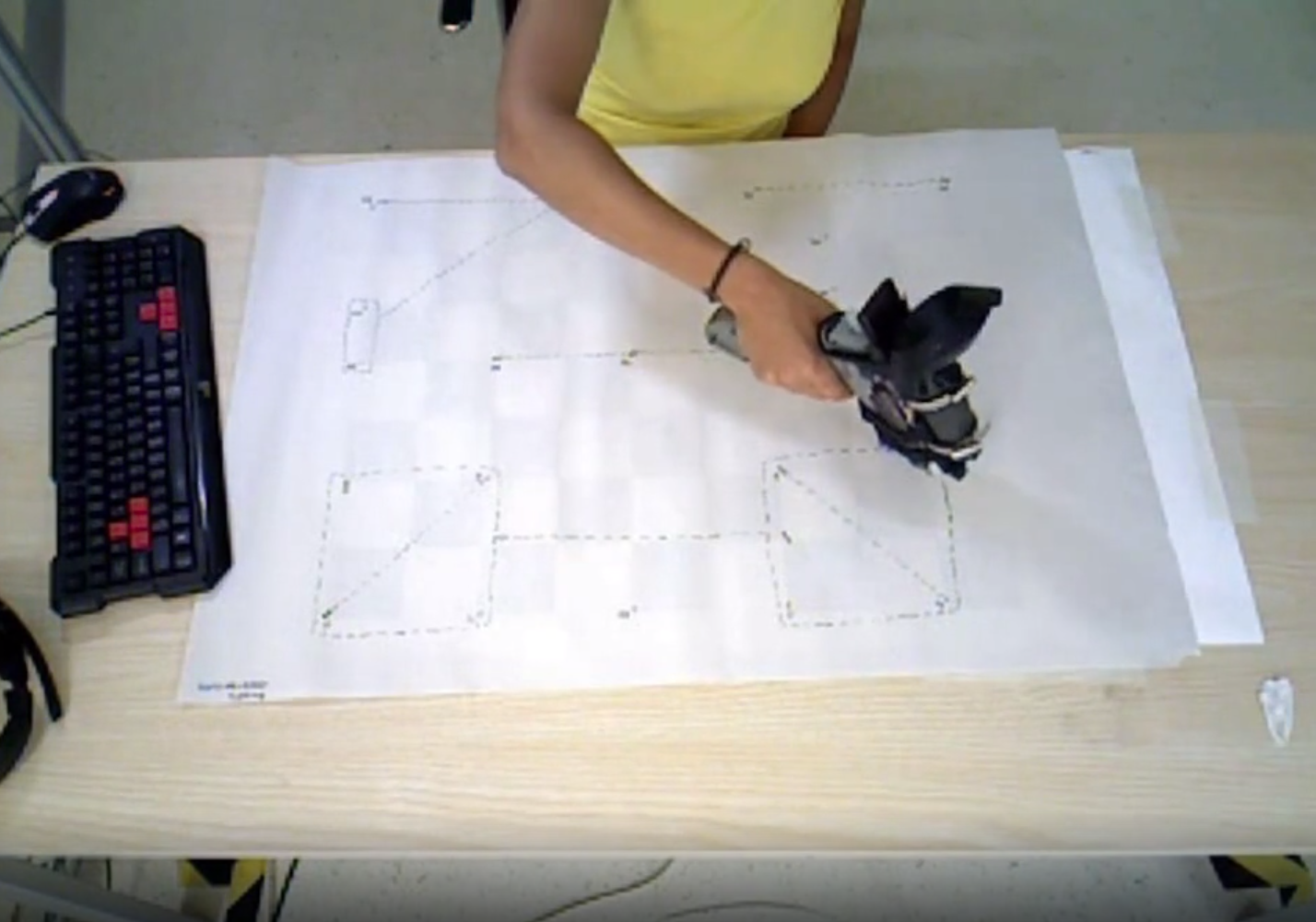
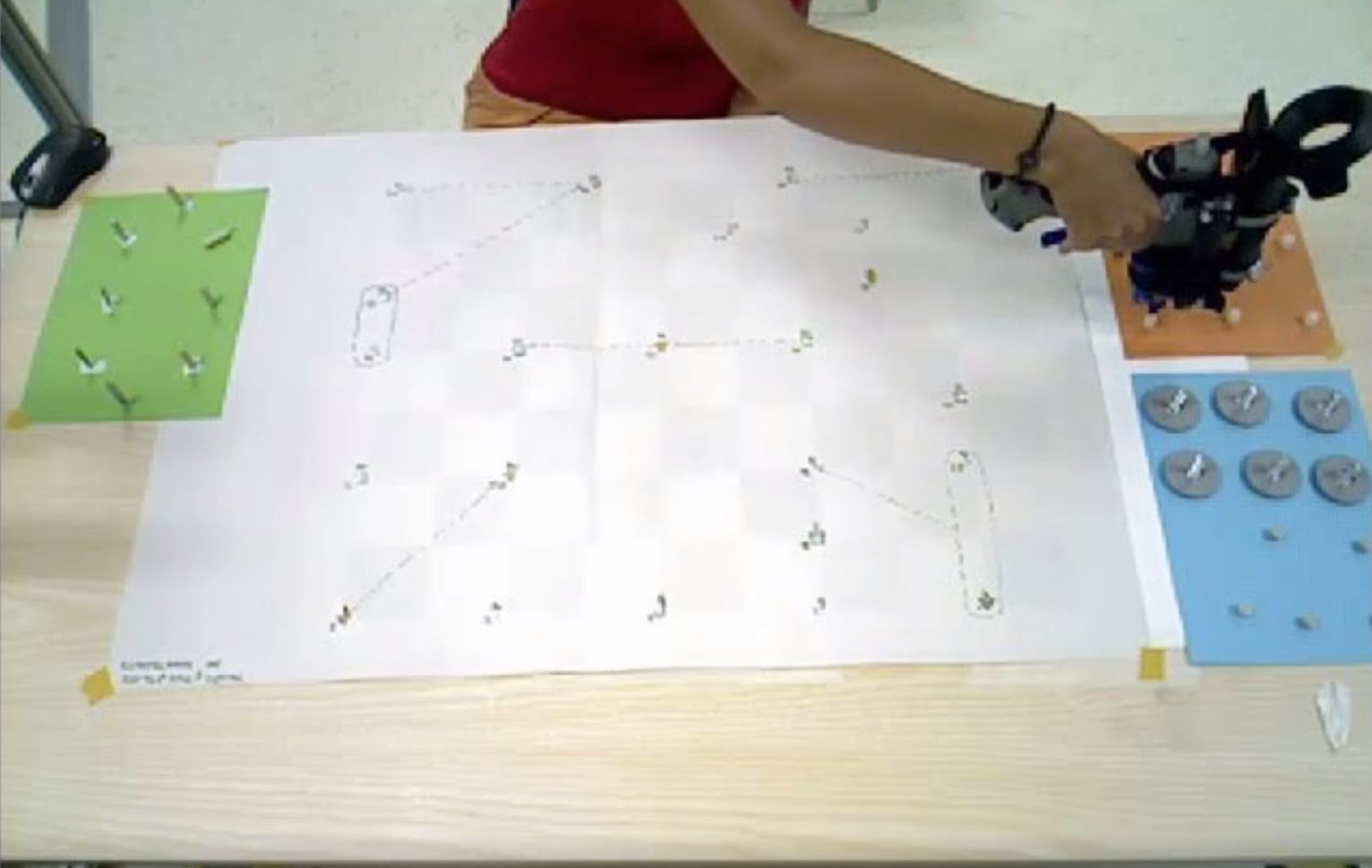
There is only one user in this dataset, who performs glueing on multiple different shapes made of cardboard or wood. The whole variability is 5 different glueing styles, 3 different trajectories of glue application and 6 different shapes (see the pictures for a better idea). The dataset thus consists of 5 x 3 x 6 = 90 ros bags, one unique combination in each. The scene is recorded by one Asus XTION camera attached from above.
The variability of the glueing styles, shapes and trajectories is following:
Raw version
As mentioned in the description, there are 90 ros bag files named after the specific combination of trajectory, glueing style and shape. The task is performed by a different user than in the other datasets, so it can be used for evaluation of generalization capabilities.
The complete list of ROS topics available:
/XTION3/camera/depth/camera_info
/XTION3/camera/depth/image_rect
/XTION3/camera/rgb/camera_info
/XTION3/camera/rgb/image_rect_color/compressed
/controller1
/end_point
/tf
/vive/joy0
...
/vive/joy15
Processed version
Since the overall size of the dataset is very large (more than 150 GB), we provide several processed bag files as example along with code to generate the same annotations for any bag files of your selection. The annotations include RGB images, depth images, 6DOF pose and pickle annotations with bounding boxes which can be used for training.
Special showcases
Description
This dataset was created for the research paper Specifying Dual-Arm Robot Planning Problems Through Natural Language and Demonstration. It includes four different showcases in which a human demonstrator uses the glue gun to perform glueing task for furniture assembly. Since most of the bag files (except for sentence-wise bag files) contain the glue gun 6DOF pose as well as RGBD image, they can be used for additional training or testing of motion tracking. These showcases are also provided with natural language commands which might serve as an additional source of information.
See more information in the Planning section